Industrial automation systems require increasing levels of operational dependability and safety.
Modern systems feature sophisticated equipment with mechanical, electrical, and thermal hazards.
Engineers have to simultaneously safeguard production continuity, equipment, and personnel.
Engineers must protect personnel, equipment, and production continuity simultaneously. Conventional control strategies alone cannot guarantee acceptable risk reduction. For this reason, protective mechanisms are integrated into automation architectures.
Among these mechanisms, fail-safe systems hold critical importance. They ensure predictable behavior when faults or abnormal conditions occur.
Instead of maximizing productivity during failure, they prioritize safety outcomes.
Their design philosophy assumes that components can and will fail. Understanding fail-safe principles is essential for responsible automation engineering practice.
This article reviews the concept of fail-safe systems, their design philosophy, architectural principles, standards compliance, and practical industrial applications.
Fundamentals of Automation Control Systems
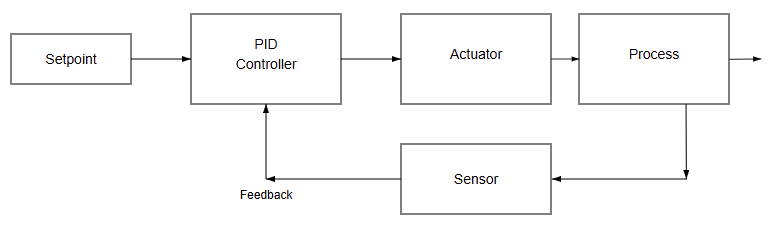
Industrial automation relies on deterministic control executed by programmable devices. Controllers receive input signals from sensors distributed across machinery. These inputs represent temperature, pressure, position, or safety status.
The controller processes signals using predefined logical algorithms. Outputs then command actuators such as motors, valves, and contactors. Standard control systems emphasize efficiency, availability, and productivity optimization.
They are widely deployed in manufacturing. Also, they are utilized in water treatment sectors and energy facilities.
Vendors such as Siemens and Rockwell Automation provide global automation platforms. These systems typically focus on maintaining continuous process operation.
However, continuous operation is not always the safest outcome. When abnormal conditions arise, protective intervention becomes necessary.
Fail-safe systems address this requirement by ensuring controlled shutdown. They complement standard control layers within hierarchical automation architectures.
What is a Fail-Safe System in Automation?
A fail-safe system is engineered to default to a safe state. This transition occurs automatically when a fault is detected.
The safe state minimizes risk to humans and equipment. Unlike conventional systems, performance during failure is not prioritized.
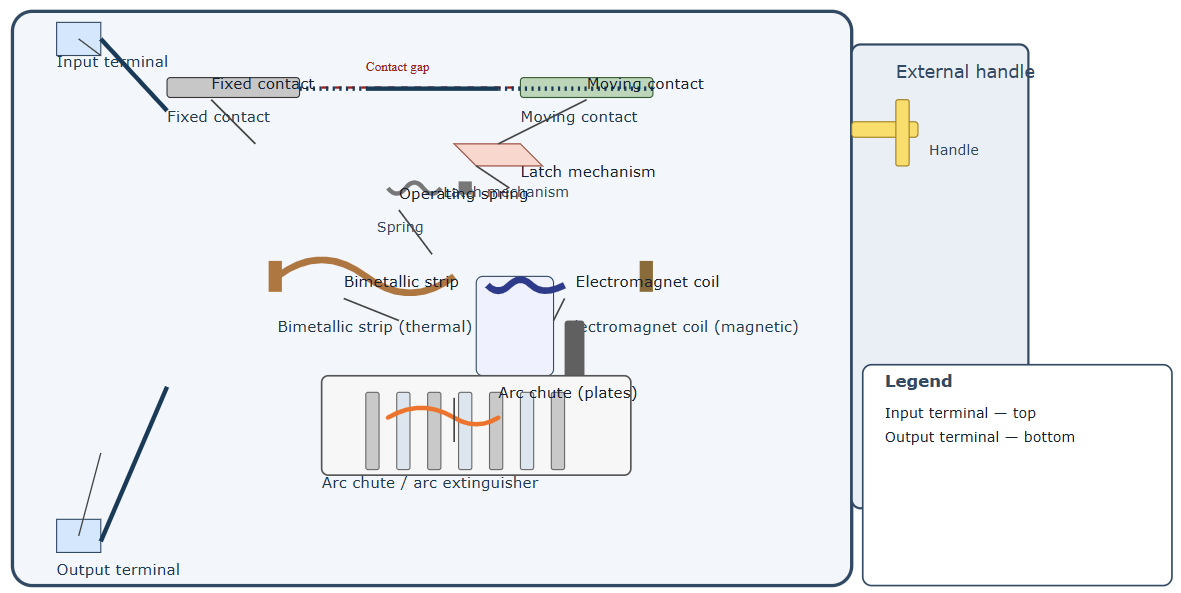
Instead, predictable hazard mitigation becomes the primary objective. A fail-safe design anticipates power loss and component malfunction. Outputs are typically de-energized to eliminate hazardous motion.
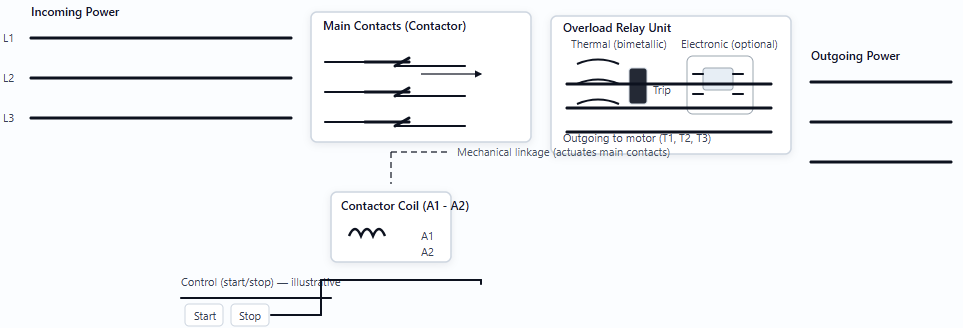
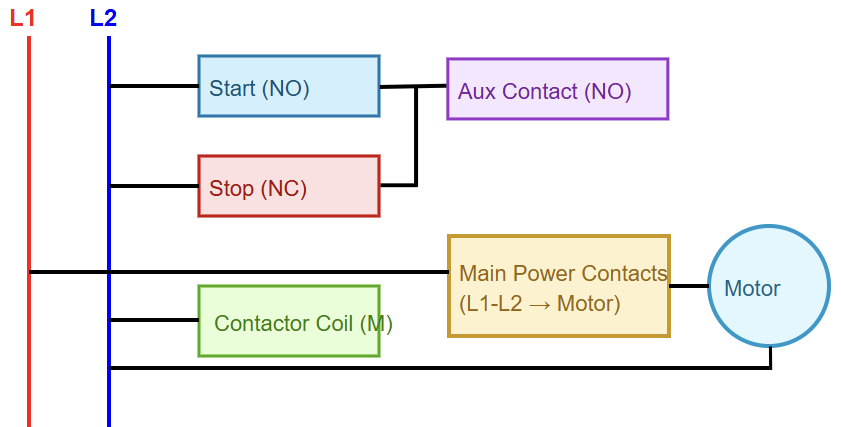
For example, a motor contactor may drop out during failure. This prevents unintended mechanical movement or energy release. The principle applies across electrical, mechanical, and software domains.
Fail-safe systems are foundational elements of functional safety engineering. They contain and manage faults to prevent large-scale failure events.
Relationship with Functional Safety Standards
Fail-safe design principles align closely with international safety standards. The most recognized standard is IEC 61508 for electrical safety systems. Another widely applied machinery standard is ISO 13849.
These standards define systematic processes for achieving risk reduction. They introduce measurable integrity metrics for safety functions. Designers must demonstrate that the dangerous failure probability remains acceptable.
Compliance requires structured lifecycle documentation and verification. Hardware architecture must tolerate predictable fault conditions. Software development must follow validated and traceable methodologies.
Fail-safe systems are therefore not arbitrary protective additions. They are carefully engineered to meet defined performance levels. Certification provides confidence in their reliability under hazardous scenarios.
Core Design Philosophy of Fail-Safe Systems
The fundamental philosophy assumes that failures are inevitable. Therefore, systems must respond safely rather than unpredictably. This mindset differs significantly from traditional reliability engineering.
Reliability seeks uninterrupted performance under normal conditions. Fail-safe engineering focuses on controlled behavior during abnormal conditions. Designers intentionally define what “safe” means for each application.
In many electrical systems, the safe state is de-energization. Springs may return mechanical components to neutral positions. Valves may close automatically when control pressure disappears.
Electrical circuits often employ normally closed safety contacts. If wiring breaks, the circuit opens and stops operation.
This arrangement ensures the detection of disconnection faults. Such design practices reduce the likelihood of hidden, dangerous failures. Predictable shutdown becomes a deliberate and verified outcome.
Architectural Principles and Redundancy
Redundancy is frequently integrated within fail-safe architectures. Dual-channel circuits monitor safety devices independently. Both channels must agree before hazardous motion is permitted.
If disagreement occurs, the system initiates a shutdown. This structure reduces vulnerability to single-component failure. Some systems implement diverse processor architectures for added robustness.
Safety controllers often compare execution results cyclically. Memory integrity checks are performed during each scan cycle.
Input circuits detect short circuits and cross faults. Output circuits may monitor feedback from external relays.
These mechanisms collectively increase diagnostic coverage significantly.
Architectural discipline distinguishes fail-safe systems from conventional controls. The objective remains minimizing undetected dangerous faults.

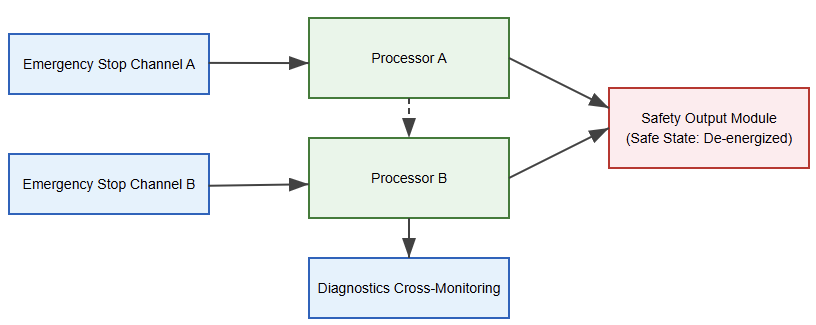
Basic Fail-Safe Architecture with Redundant Channels and Safe-State Output
Electrical Implementation Techniques
Electrical fail-safe design uses specific circuit arrangements. Emergency stop circuits commonly utilize normally closed pushbuttons. Pressing the button opens the safety circuit deliberately. If wiring breaks, the circuit also opens automatically.
This behavior ensures detection of cable disconnection failures. Safety relays incorporate force-guided contact mechanisms internally. These contacts mechanically prevent contradictory output states.
Redundant contactors may disconnect motor power independently. Feedback loops confirm actual de-energization of power circuits. Power supplies supporting safety systems often include redundancy.
Loss of one supply does not immediately compromise integrity. Ground fault monitoring may also be incorporated for detection. These techniques collectively enhance electrical hazard mitigation capability.
Software Considerations in Fail-Safe Logic
Software plays a critical role in modern fail-safe systems. Safety logic must execute deterministically within bounded cycle times. Watchdog timers supervise execution to detect software freeze conditions.
If timing limits are exceeded, the system transitions safely. Programming environments may restrict unsafe coding constructs intentionally.
Certified safety function blocks are commonly utilized. These blocks undergo extensive verification before release.
User modifications are controlled through structured change management. Traceability from requirement to implementation is mandatory.
Documentation supports later audits and regulatory inspections. Fail-safe software, therefore, complements hardware redundancy measures. Both domains cooperate to achieve acceptable risk reduction.
Communication and Network Reliability
Distributed automation increasingly relies on network communication. Fail-safe systems must maintain integrity across communication channels.
Safety protocols add redundancy and validation mechanisms. Time stamping and sequence counters detect transmission anomalies.
Corrupted or delayed messages trigger protective responses. Deterministic fault detection timing remains essential for compliance. Network configuration changes may require revalidation of safety analysis.
Safety communication layers ensure consistent behavior across devices. They support complex machines with multiple protective zones.
Robust communication design prevents hidden faults within networks. This ensures coordinated and predictable protective action.
Industrial Applications of Fail-Safe Systems
Fail-safe systems are widely deployed across industries. Automotive production lines utilize protective guarding and interlocks. Robotic cells immediately halt when light curtains detect intrusion.
Process industries apply fail-safe valves in hazardous environments. Companies such as Honeywell provide integrated safety platforms.
Oil and gas facilities often demand high-integrity shutdown systems. Boiler management systems rely on flame failure detection circuits.
Conveyor systems implement safe speed monitoring functions. Elevators employ fail-safe braking mechanisms for passenger protection.
In each scenario, a controlled shutdown protects human life. The cost of failure far exceeds equipment replacement expenses.
Economic and Strategic Considerations
Fail-safe systems generally increase project capital expenditure. Redundant components and certification processes require investment. Engineering expertise must support validation and documentation activities.
However, accident consequences often involve severe financial loss. Noncompliance can result in severe regulatory sanctions and legal consequences.
Insurance frameworks frequently mandate certified protective systems. Reputation damage following incidents may be irreversible.
Strategic planning, therefore, incorporates safety from the initial design stages. A layered architecture often separates control and safety domains. Standard controllers manage production efficiency and optimization.
Dedicated safety systems oversee the management of hazardous energy sources. This structured separation enhances clarity and compliance.
Long-term operational sustainability depends upon responsible safety investment.
Integration with Safety PLC Technology
Modern fail-safe implementations frequently use specialized controllers. These devices are known as Safety PLC units.
They differ from conventional controllers through redundancy and diagnostics. Dual processors compare logic execution results continuously.
Certified programming environments restrict unsafe implementation practices. Safety Integrity Levels define measurable performance expectations.
If internal inconsistencies arise, outputs transition automatically. This ensures predictable behavior during internal faults.
Safety PLCs, therefore, embody fail-safe principles systematically. They integrate hardware, software, and diagnostics coherently. Such integration simplifies compliance within complex automation systems.
Conclusion
This article introduced the principles of fail-safe systems within industrial automation environments.
It explained how a fail-safe design prioritizes predictable safe behavior during faults. Architectural redundancy and diagnostic coverage were described thoroughly.
International standards define measurable integrity requirements for implementation. Electrical and software techniques cooperate to enforce protective shutdown.
Industrial applications demonstrate their necessity across hazardous operations.
Economic analysis confirms that prevention outweighs accident consequences.
Fail-safe philosophy assumes failure yet controls its impact responsibly. Integration with approved controllers improves dependability and compliance.
Knowing these ideas helps engineers to create automation systems that properly safeguard people, machinery, and long-term operating continuity.
FAQs: What is a Fail-Safe System in Automation?
What is a Fail-Safe System in Automation?
Upon failure, a system sets to default to a secure condition.
Automation benefits from fail-safe systems since they provide
During power outages or fault conditions, they help to stop dangerous situations from worsening.
What kind of arrangement is a fail-safe circuit looking for to identify wiring problems?
It uses normally closed contacts that open when wiring integrity is compromised.
Are fail-safe systems required by standards?
Yes, standards like IEC 61508 require validated safety behavior. This is also applicable for standards like ISO 13849.
Do fail-safe systems reduce productivity?
They may interrupt operation, but they significantly reduce catastrophic risk.